Robot Vision: Muscle-Like Action Allows Camera to Mimic Human Eye Movement
gtresearchnews.gatech.edu
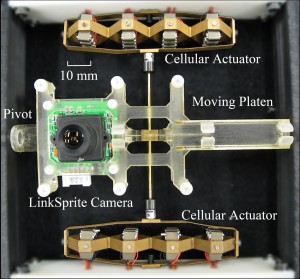 Photo shows the camera positioning system used by researchers Joshua Schultz and Jun Ueda from Georgia Tech’s School of Mechanical Engineering. (Credit: Joshua Schultz)
Photo shows the camera positioning system used by researchers Joshua Schultz and Jun Ueda from Georgia Tech’s School of Mechanical Engineering. (Credit: Joshua Schultz)
Using piezoelectric materials, researchers have replicated the muscle motion of the human eye to control camera systems in a way designed to improve the operation of robots. This new muscle-like action could help make robotic tools safer and more effective for MRI-guided surgery and robotic rehabilitation.
Georgia Tech Ph.D. Candidate Joshua Schultz makes some final adjustments to the camera positioning mechanism used in the muscle-like cellular actuators of the robot vision system. (Click image for high-resolution version. Credit: Billy Gallagher)
Key to the new control system is a piezoelectric cellular actuator that uses a novel biologically inspired technology that will allow a robot eye to move more like a real eye. This will be useful for research studies on human eye movement as well as making video feeds from robots more intuitive. The research is being conducted by Ph.D. candidate Joshua Schultz under the direction of assistant professor Jun Ueda, both from the George W. Woodruff School of Mechanical Engineering at the Georgia Institute of Technology.
“For a robot to be truly bio-inspired, it should possess actuation, or motion generators, with properties in common with the musculature of biological organisms,” said Schultz. “The actuators developed in our lab embody many properties in common with biological muscle, especially a cellular structure. Essentially, in the human eye muscles are controlled by neural impulses. Eventually, the actuators we are developing will be used to capture the kinematics and performance of the human eye.”








